

HRU100-24智能航磁探测系统是一款集成了铷光泵和三轴磁通门传感器的实时通信航磁产品。通过校准补偿算法,融合了先进的空间插值算法、粒子群算法、线性/非线性回归算法,弱磁探测能力强,目标探测距离远,能够实现地下/水下铁磁性目标的探测、定位与识别。应用场景:地磁信息采集、矿产资源勘探、地下/水下目标搜探。
运行环境:
Windows11家庭版22H2、显示器分辨率1920×1080、内存8G以上、Intel(R) Core(TM)i5-8400 @ 2.8GHz 2.81GHz。
使用方法:
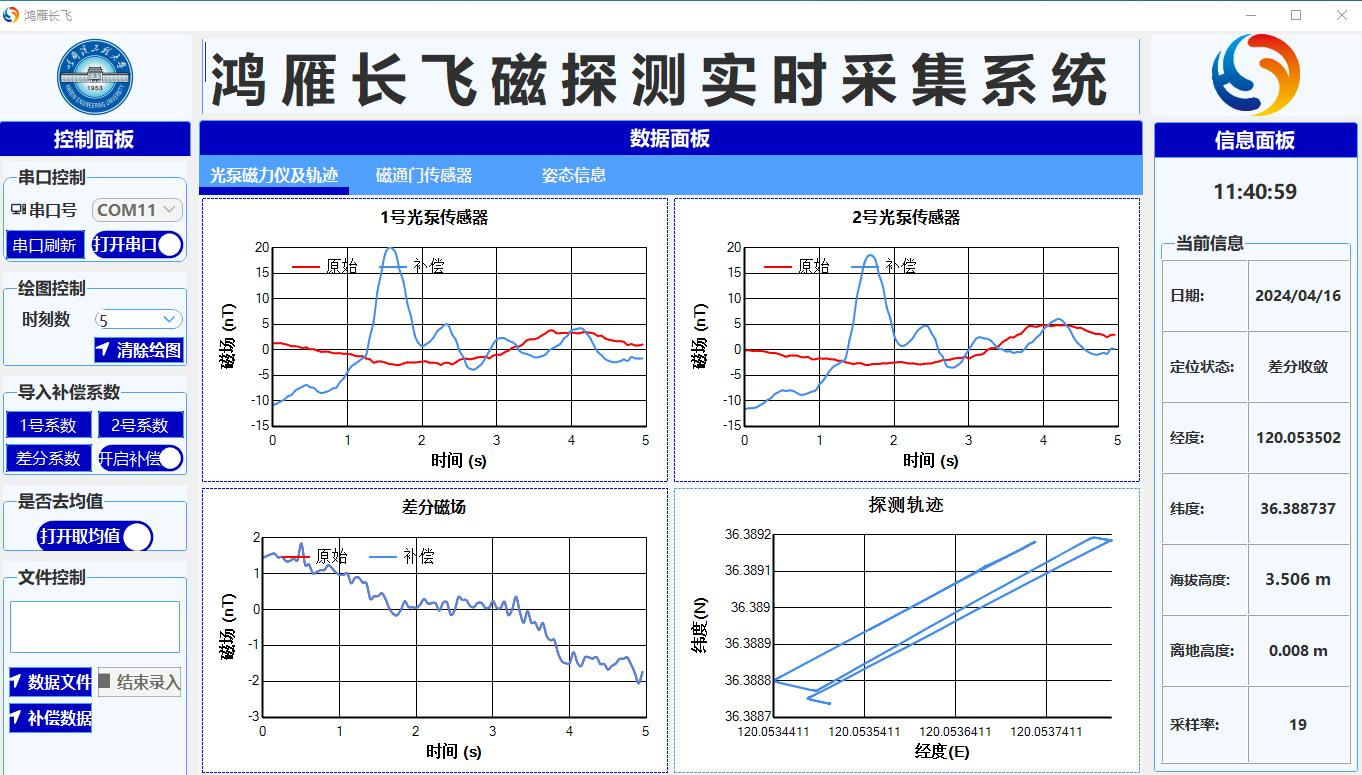
将地面端数据传输模块通过USB端口连接计算机或掌上电脑等,打开相应的串口,探测系统上电后,等待光泵预热30秒,方可正常工作;
导入补偿系数,可以实现对探测数据的实时姿态补偿,并与原始数据进行同步显示;
通过调整绘图的窗长,可以实时更改数据展示窗口的数据量,但不会改变窗口自身的大小;
点击文件控制下的“数据文件”按钮,开始记录数据,点击“结束录入”,结束数据录入,数据文件命名规则为“年-月-日-时-分-秒 DataFusion.txt”,也可自行更改命名。
使用方法:
数据导入可选择导入补偿数据、探测数据、日变数据,点击“选择文件”按钮,选择要导入的数据文件;
数据预处理实现对采集数据中的死区异常值剔除;
算法中心求解并应用姿态补偿系数,有效补偿载体噪声干扰,并支持补偿系数导出;
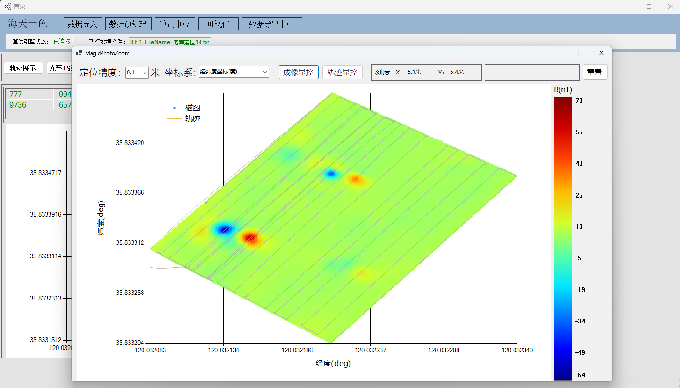
可视化能够快速绘制探测轨迹,测线磁异常,区域磁图,准确获取所需信息;
基于获取的地理和磁场数据进行数据融合,应用“空间插值算法”实现经纬度与磁场数据的时空映射成像,支持选择精细区域单独成像,关注重点区域的磁场成像;
基于“粒子群算法”,反演目标的深度和位置信息,基于“深度学习”对疑似目标进行识别判断。