
鱼龙潜跃FEM24水下主动磁探测系统,兼顾水下铁磁性、非铁磁性目标探测的能力,可对水下掩埋的铝、铜、钛和铁等目标进行精确的水下勘测。该系统可测量、显示和记录目标在的位置和深度,目标的埋藏状态对系统的运行没有影响。 应用场景:海上风电、管线巡检、水下消防救援
电磁场收发系统
信号实时采集系统
RTK定位系统
有缆水下机器人
兼顾水下铁磁性、非铁磁性目标测能力
测控距离:200 m
耐压等级:300 m
1.工作原理
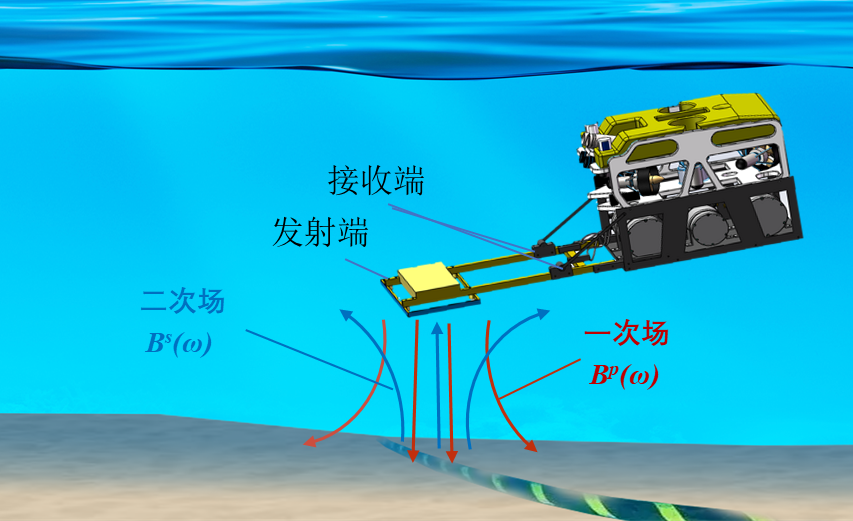
发射线圈在传导电流的激励下产生辐射磁场,称为一次场B^p(ω) 。一次场入射到金属目标上,根据法拉第电磁感应定律,金属目标产生涡流,再根据安培环路定律,产生感应磁场,称为二次场B^s(ω),得以被鱼龙潜跃FEM24的接收端感知。
2.快速便捷安装
1.能探测什么东西?
可以用于探测所有类型的金属物体,如含铝、铜、钛、铁的海缆、管道。
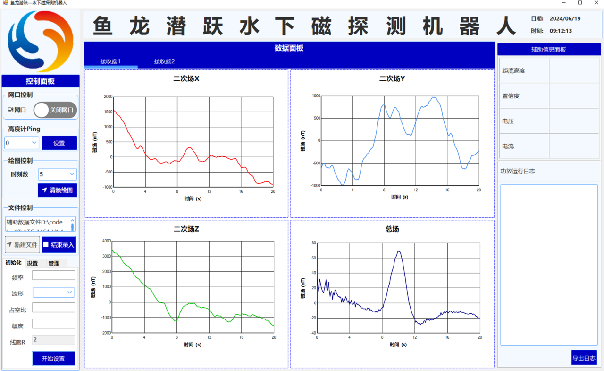
软件系统
运行环境:Windows10及以上、显示器分辨率1920×1080、内存8G及以上、CPU:i5十代及以上。
使用方法
a)ROV设备上电后 ,方可打开网口,软件开始正常工作,数据以txt格式存储到本地文件中。
b)通过调整绘图的窗长,可以实时更改数据展示窗口的数据量,但不会改变窗口自身的大小。
c)在初始化部分可输入频率、波形、占空比、幅度一键配置参数并启动功放。
d)设置部分可以直接对频率、波形、占空比、幅度等参数进行逐一修改。
e)通过点击“新建文件”、“结束录入”按钮,可以重新创建文件、保存数据,控制数据采集批次。
a) 主动磁探测系统 (基础包)
b) 浑水相机 (基础包)
c) 超短基线定位系统 (选配)
d) 多波束声呐成像声呐 (选配)