
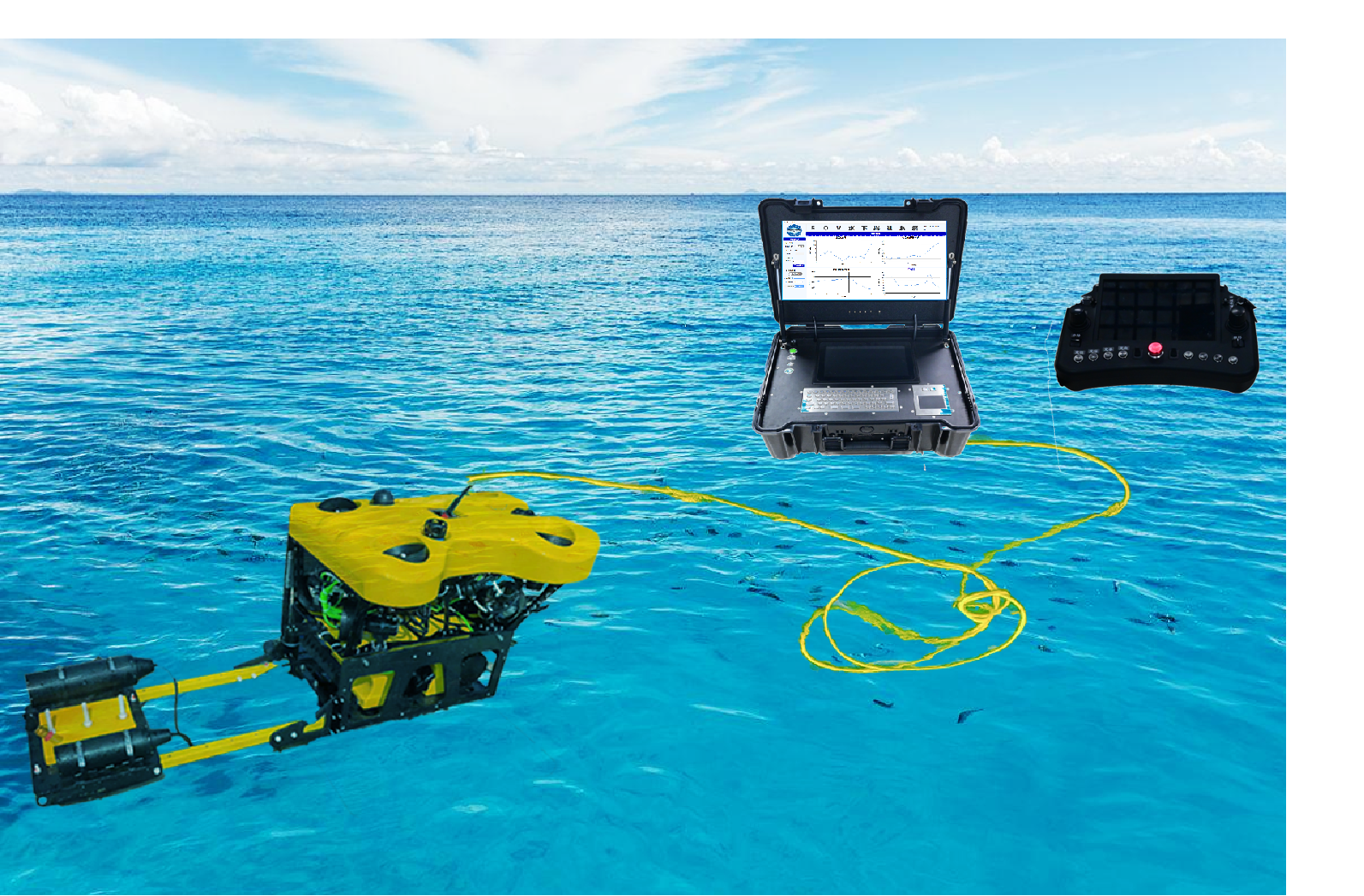
FRU200-24水下智能ROV声、磁一体化探测系统可以完成水下掩埋目标探测、考古、巡检、搜救等任务。此探测系统具有多物理场复合探测识别、集成度高、可靠性强等特性,具有广泛的应用。
系统组成:
磁:光泵+磁通门
声: 多波束声呐
光:水下摄像机
定位:北斗RTK模块
平台:有缆水下机器人
双轴机械手
测控距离:200m
耐压等级:300m
具备水下声呐成像能力
具备水下掩埋目标磁探测能力
1.复杂使用场景:
能够实现近海浅滩等多应用场景的未爆弹探测与定位。
2.简单航行操作:
借助VP80水下机器人平台,使得系统稳定且易于操作。
3.水下定位与导航:
借助USBL水声定位系统提供平台水下位置,完成水下导航。
4.实时通信:
半径200m内稳定实时传输平台数据,满足即时进行判断处理。
1.能探测什么东西?
可以用于探测铁磁性物体,如管道、未爆弹
2.探测能力?
72式地雷 ≥ 2米
水泥弹≥ 4米
100×10平方米海域 ≤ 30分钟
探知率≥ 90%
虚警密度 ≤ 0.05个/平方米
鱼龙潜跃—实时采集软件:
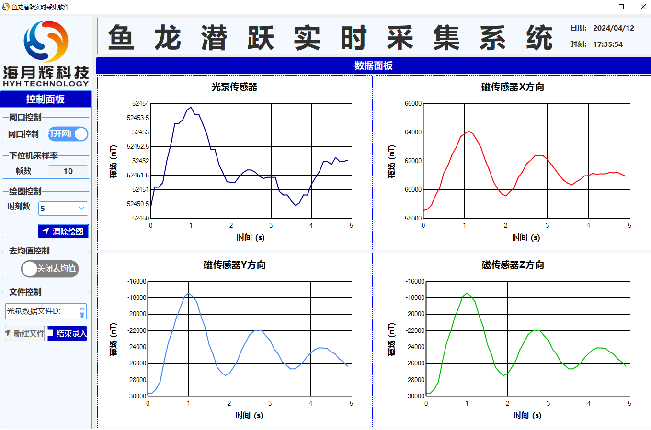
a) 磁探测系统 (选配)
1. 双光泵(总场)
2. 双磁通门(三分量)
3. 光泵(总场) +磁通门(三分量)
b) 多波束声呐(选配)
c) 浑水相机 (基础包)
d) 超短基线定位系统 (选配)